Teaching App
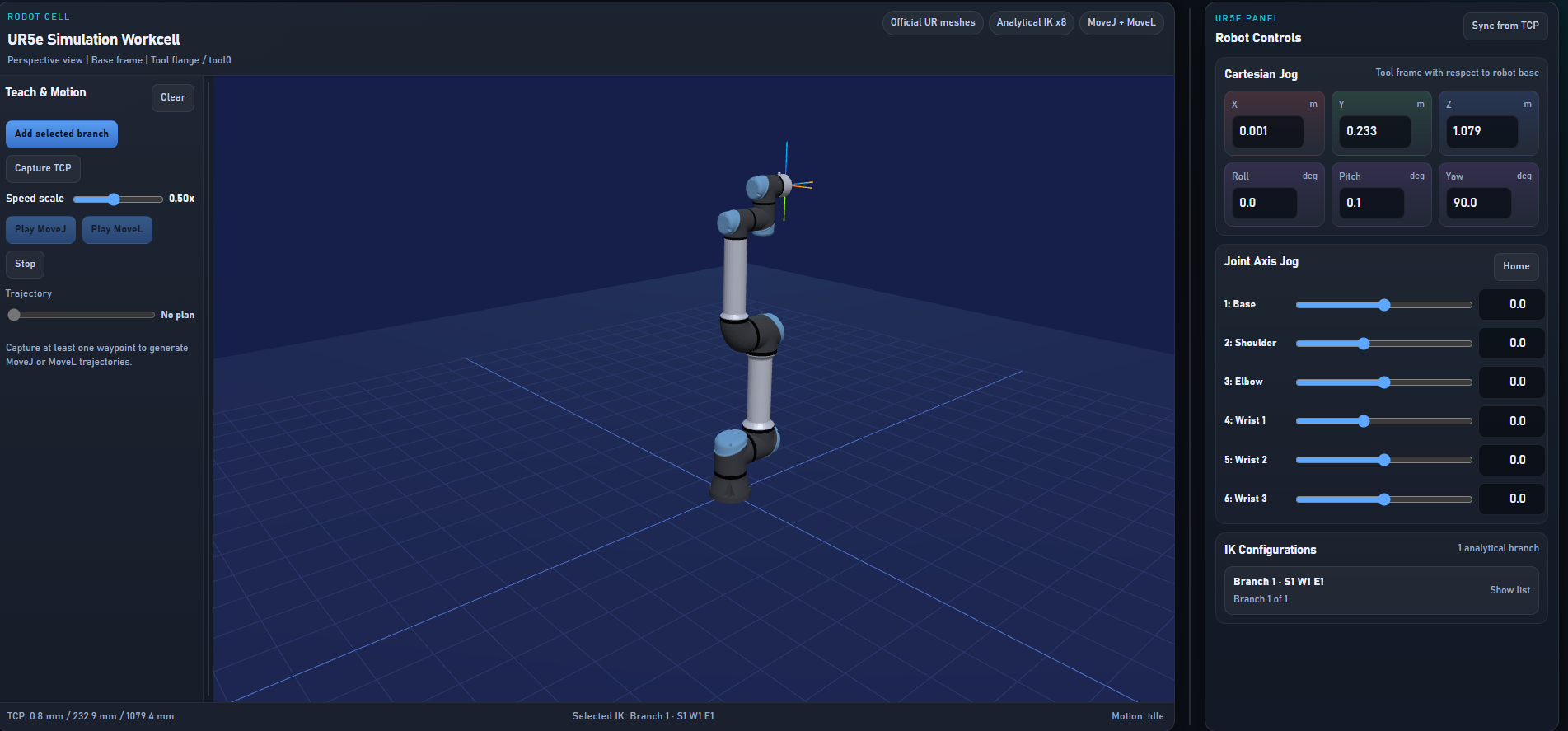
UR5e Teach & Play is a browser-based UR5e simulation workspace built with React, TypeScript, Vite, and Three.js. It is designed as a teaching and demonstration tool for robot kinematics, interactive jogging, inverse kinematics branch selection, waypoint capture, and MoveJ playback in a browser environment.
The app visualizes the UR5e robot with public Universal Robots mesh assets, lets users jog all six joints, solve analytical inverse kinematics for a target TCP pose, and build waypoint sequences that can be replayed through joint-space interpolation.