Research Highlight
Large Language Model Assisted Human-AI Collaborative Development of Analytical Inverse Kinematics Solvers for Robot Manipulators
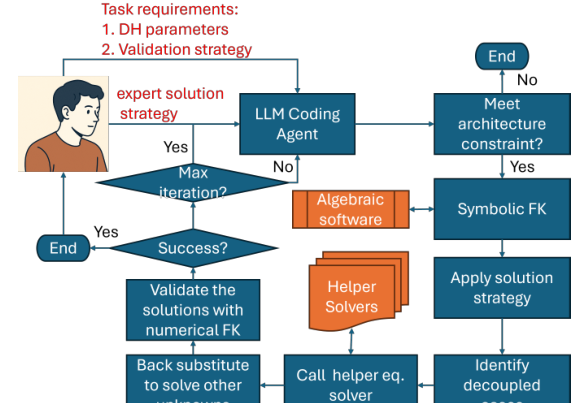
This recent highlight, accepted for publication in Mechanism and Machine Theory, presents a human-AI collaborative workflow for deriving analytical inverse kinematics solvers for industrial robot manipulators. The approach combines human intuition, mathematical decomposition, AI-assisted coding, symbolic reasoning, and validation.
The method was demonstrated on spherical-wrist and parallel-joint 6R robot architectures and achieved strong robustness across large validation sets while reducing solver-development time from weeks to minutes.
Project page Journal paper YouTube presentation Slide deck Preprint
Research Focus
We study how intelligent algorithms can synthesize engineering concepts, geometric structures, and mechanically valid designs from high-level objectives, physical constraints, and performance targets.
A current emphasis is the use of AI as a collaborative engineering partner for difficult analytical problems in robotics and mechanism design, where the goal is not just code generation but dependable derivation, implementation, and verification.