Research Focus
Our work investigates compliant structures, soft actuation principles, and analysis tools for systems that exploit elasticity, distributed deformation, and material intelligence.
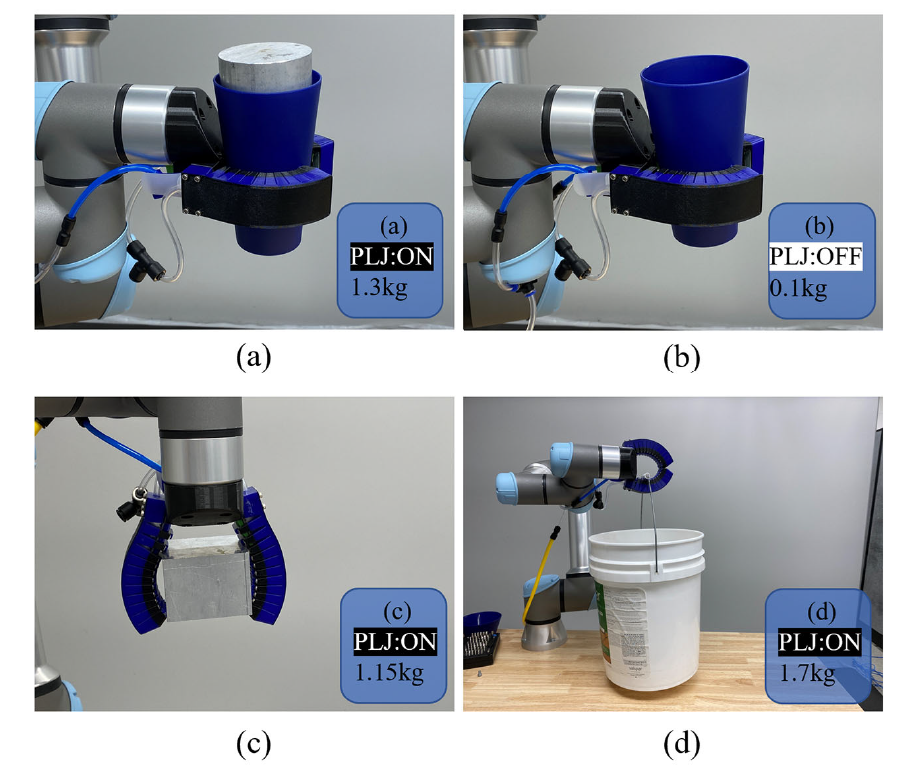
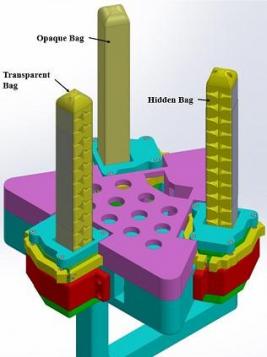
- Adaptive robotic grippers based on layer jamming for tunable stiffness and broader grasp adaptability.
- Compliant and soft robots for mobile, industrial, and manipulation tasks.
- Mechanical design applications in aerospace structures, precision machinery, medical devices, haptics, sensing, and deployable mechanisms.