Research Focus
We design robotic systems and mechanisms through integrated reasoning over embodiment, transmission, mobility, task requirements, and manufacturability.
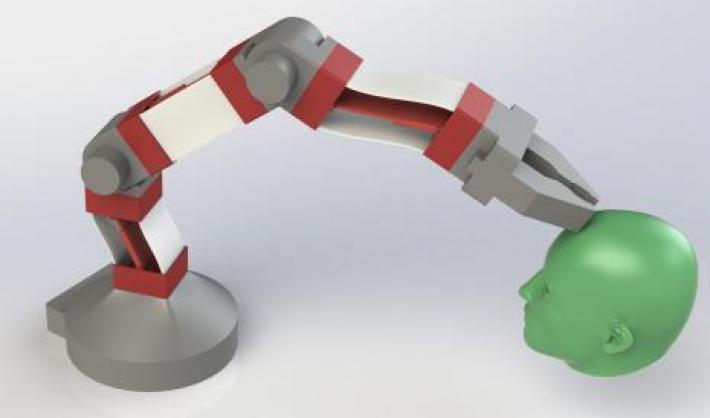
- Human-safe co-robots for manufacturing with variable and controllable stiffness, supported by the NSF National Robotics Initiative.
- Compliant mechanism design for variable-stiffness robotic arms and pseudo-rigid-body models for dynamics simulation.
- Transformable wheel robots for versatile terrain navigation.